TensorFlow GoogLeNet Inception-v3 の特徴マップの可視化
単純な ConvNet モデルや AlexNet モデルで MNIST / CIFAR-10 の特徴マップやフィルタを TensorFlow で実装して可視化しましたが、より本格的なモデルで試してみます。
今回は TensorFlow で提供されている、トレーニング済みの GoogLeNet Inception-v3 モデルを使用しました。層数が多いので全ての層の出力を確認するのは煩雑なので、入力直後の畳込み層と最後の畳込み層からの出力、そして次元が圧縮されてサイズが縮小された際の特徴マップを適当な畳込み層から選択して可視化してみました。
GoogLeNet TensorFlow 実装の特徴マップ
以下は、入力前のサンプル画像です。
左が元画像、右が正規化後の画像を 3 チャネルで分解してグレースケール表示したものです :
|
 |
* 元画像は ImageNet からピックアップしています。版権は所有者に帰属します。
以下は、最初の畳込み層からの出力マップです。サイズは 111 x 111。
明るさと輝度は調整してあります :

以下は、54 x 54 の特徴マップを出力する中間層からの出力です :

以下は、25 x 25 の特徴マップを出力する中間層からの出力です :

以下は、12 x 12 の特徴マップを出力する中間層からの出力です :

そして以下は、最後の特徴マップ出力になります :

別例です。クラスキャットのマスコット猫です。
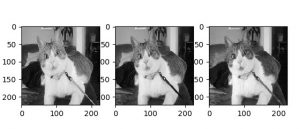
左が元画像、右が正規化後の画像を 3 チャネルで分解してグレースケール表示したものです :
|  |
以下は、最初の畳込み層からの出力マップです。サイズは 111 x 111 :

以下は、54 x 54 の特徴マップを出力する中間層からの出力です :

以下は、25 x 25 の特徴マップを出力する中間層からの出力です :

以下は、12 x 12 の特徴マップを出力する中間層からの出力です :

そして以下は、最後の特徴マップ出力です :

以上